









NovAtel Inertial Explorer v9.0
€0.00
NovAtel Inertial Explorer 9.0
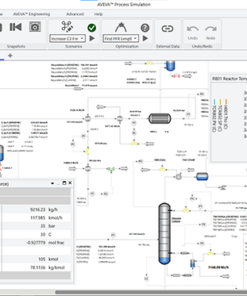
Inertial Explorer maximizes GNSS / INS hardware performance by ensuring positioning, speed, and accuracy of program vision. Strong integration of GNSS and IMU data yields accurate results even when low-grade inertia sensors are used.
NovAtel Inertial Explorer v9.0 full crack
NovAtel Inertial Explorer 9.0

Inertial Explorer maximizes GNSS / INS hardware performance by ensuring positioning, speed, and accuracy of program vision. Strong integration of GNSS and IMU data yields accurate results even when low-grade inertia sensors are used. Inertial Explorer can produce suitable results for requested applications such as mobile mapping, aerial mapping and hydrography. IMU data can be processed from fiber optics using high-level fiber optics (FOG) or gyroscope laser ring (RLG) and from low-grade sensor technology such as micro-electromechanical systems (MEMS).
This software has a workflow to match your business and expertise. A project wizard is available to enable new GNSS / INS users to generate quickly. For more experienced users, there are many processing configuration options. Automatic detection of processing environment (air, land, infantry, and marine vehicles) allows GNSS + INS processing settings to be automatically used to simplify workflows and reduce the learning curve required to start producing quality results.


Features and specifications of Inertial Explorer software:
- Build HTML QC reports
- Free and robust GNSS / INS processing
- Precise Point Positioning (PPP) processing
- Includes a flexible wizard for ASCII exports
- Boresight module for solving angular compensation between IMU and camera frames
- Full support for dual frequency GPS, GLONASS, BeiDou, Galileo and QZSS
- Direct output to Google Earth, RIEGL POF / POQ, DXF and SBET formats
- Internal processing profiles for air, ground, pedestrian, UAV and offshore projects
- Calculate the distance between the IMU and the device frame for users who need to output the attitude towards the device frame
- Customizable support for L1 + L2 (includes E5b, B2I) or L1 + L5 (includes E5b, B2a) for different applications
- Attitude correction is automatically applied to the effect of vertical deviation using an EGM2008 geographic model of the earth
Related products

petrochemical
Oil and Gas

Oil and Gas
Oil and Gas

petrochemical
petrochemical
petrochemical
Oil and Gas
chemistry software

Oil and Gas
chemistry software
Oil and Gas
Uncategorized
Mining Industry
petrochemical
Oil and Gas


Oil and Gas
Oil and Gas
Oil and Gas

engineering softwares
petrochemical

petrochemical


Mining Industry
Oil and Gas
Oil and Gas

Oil and Gas

engineering softwares

Oil and Gas

unbegrenzte version deutsch
Oil and Gas
Oil and Gas

petrochemical
Oil and Gas
chemistry software
Oil and Gas


Oil and Gas
Oil and Gas
petrochemical
petrochemical


petrochemical
Mining Industry
AutoPIPE Vessel 2026 v47.0 Piping and Vessel Design and Analysis
chemistry software

petrochemical
petrochemical


engineering softwares

Oil and Gas

